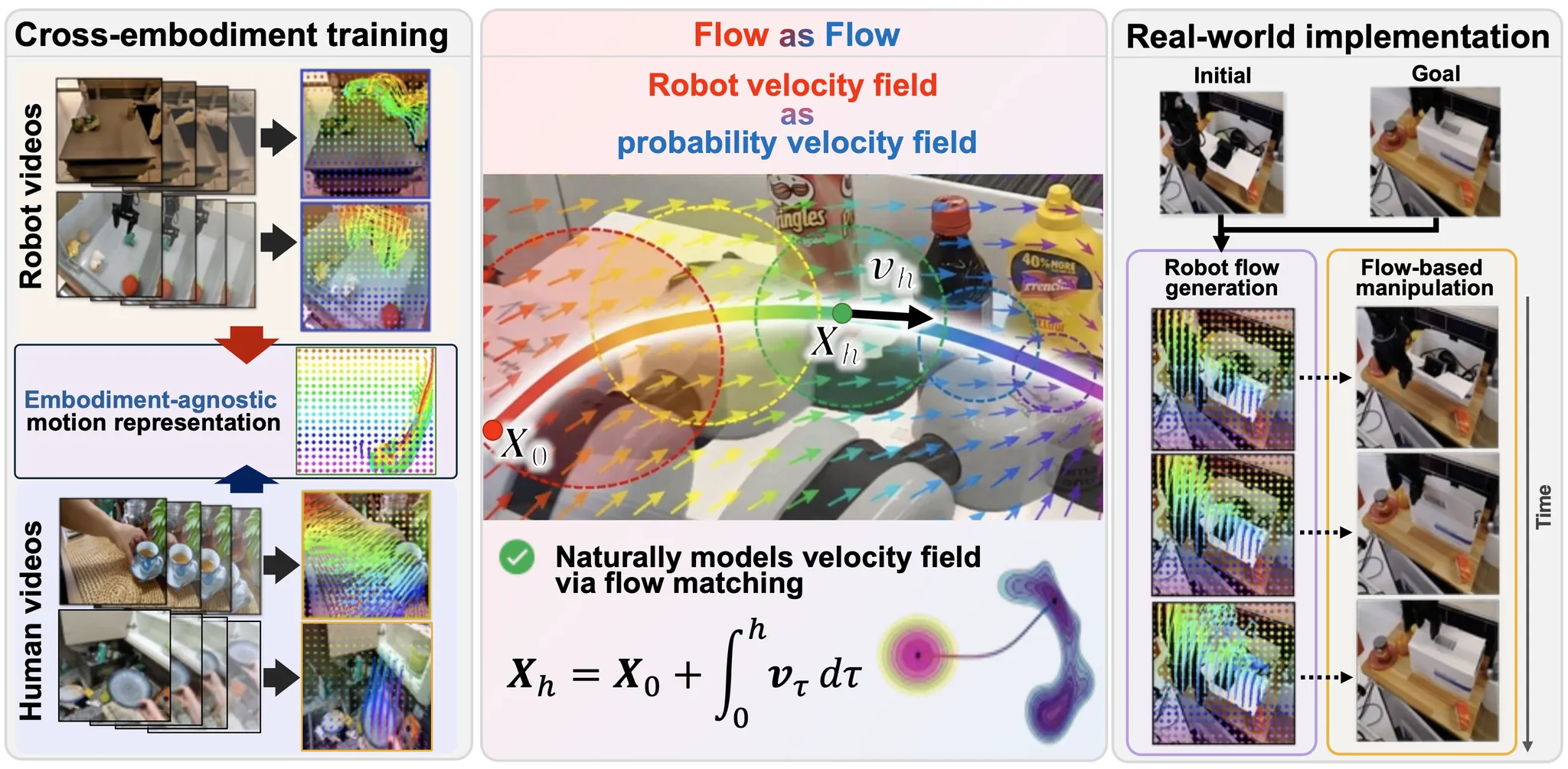
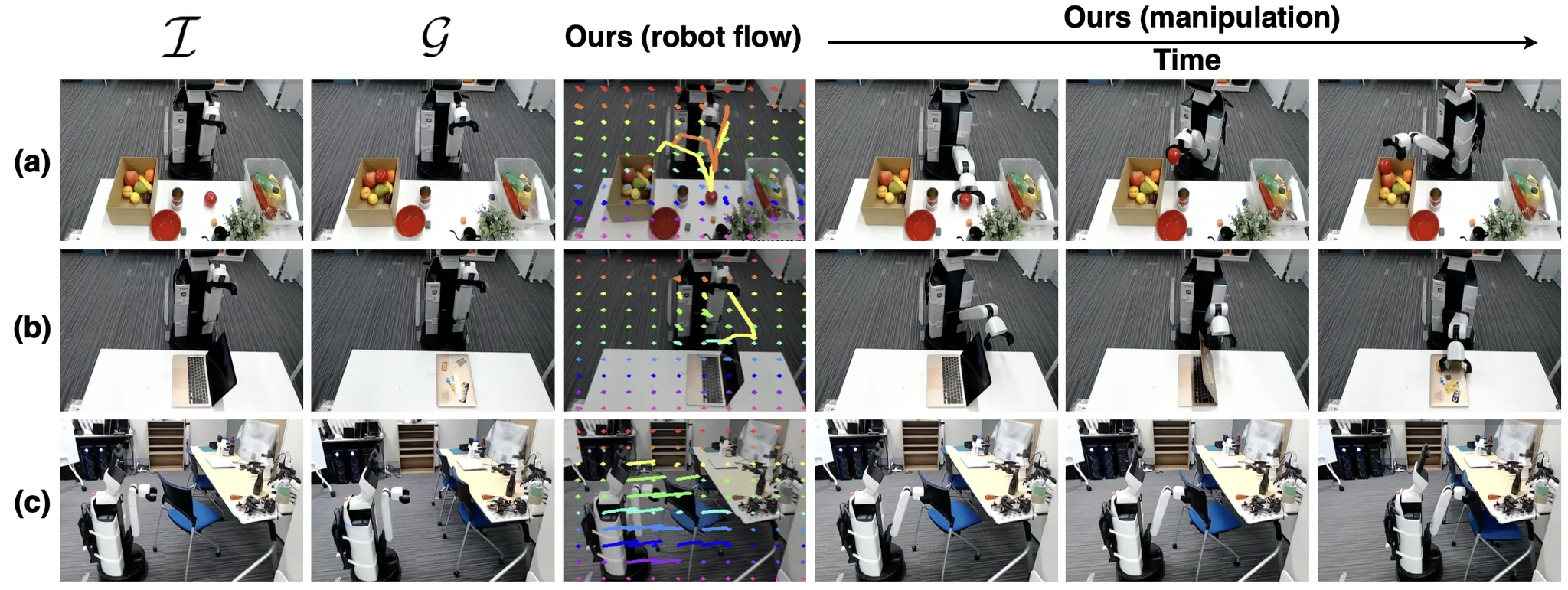
The core novelty of our framework is modeling physical robot velocity fields as probability velocity
fields in the generation space of flow matching.
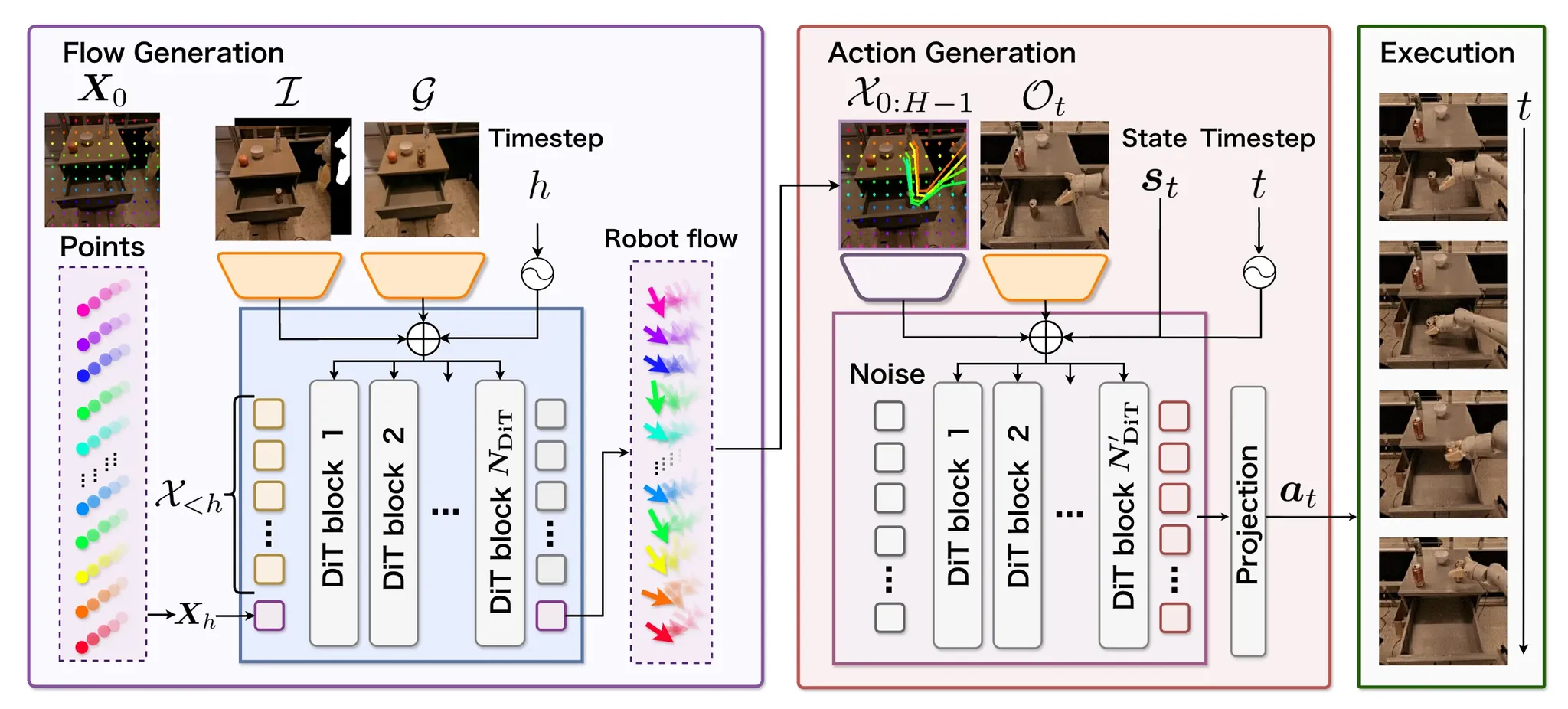
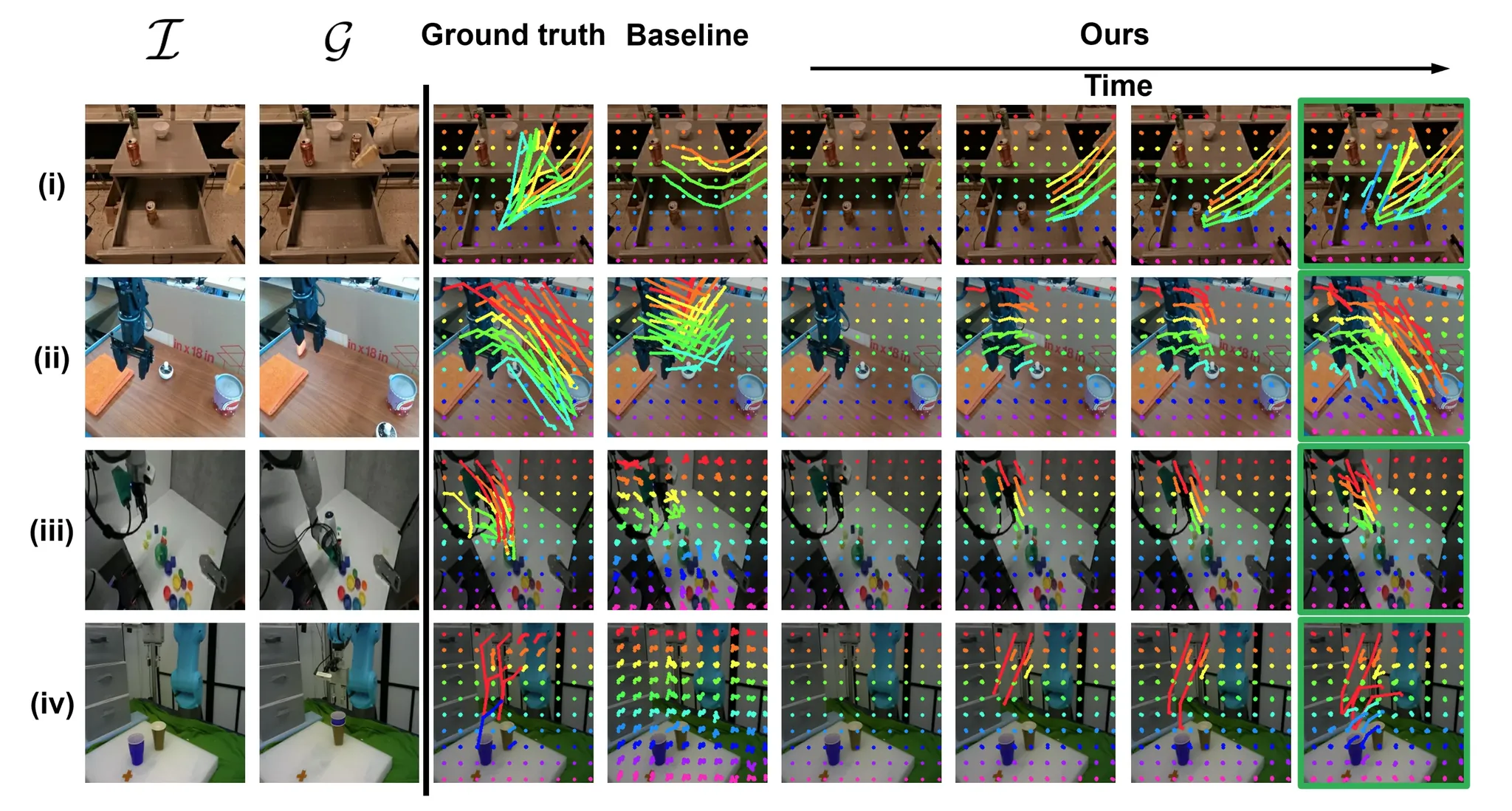
We initialize \(N\) (e.g., \(10\times 10\)) points
uniformly on the image and obtain their future positions by integrating the velocity fields predicted
by a flow generation model \(\boldsymbol{v}_\theta\).
We construct target velocity fields in a stabilizing feedback form:
\[
\boldsymbol{v}(\boldsymbol{\Xi}_h, \boldsymbol{X}, h)
= \dot{\boldsymbol{\Xi}}_h - k(\boldsymbol{X} - \boldsymbol{\Xi}_h),
\]
where \(\boldsymbol{X} \sim \mathcal{N}(\boldsymbol{\Xi}_h,\, \sigma_0^2 e^{-2kh}\boldsymbol{I})\).
The stabilization term enhances robustness to out-of-distribution samples.
We train \(\boldsymbol{v}_\theta\) with the conditional flow matching (CFM) loss:
\[
\mathcal{L}_{\text{CFM}} =
\mathbb{E}_{\boldsymbol{\Xi}_h, h, \boldsymbol{X}}
\left[\left\lVert \boldsymbol{v}_\theta\!\left(\boldsymbol{X}, h \mid \mathcal{I}, \mathcal{G}, \boldsymbol{\Xi}_{0:h-1}\right)
- \boldsymbol{v}\!\left(\boldsymbol{\Xi}_h, \boldsymbol{X}, h\right) \right\rVert^2\right].
\]
At inference, coordinates at step \(h\) are obtained by integrating \(\boldsymbol{v}_\theta\)
autoregressively, enabling fast generation with only a single ODE solve per step:
\[
\boldsymbol{X}_h = \boldsymbol{X}_0 + \int_0^h \boldsymbol{v}_\theta\!\left(\boldsymbol{X}_\tau, \tau \mid \mathcal{I}, \mathcal{G}, \mathcal{X}_{<\tau}\right) d\tau.
\]